
사파이어 프로 트리플 z axis 3축 개조 -2-
우선 이제 베드를 올려봐야 되는데 다행히 사플과는 다르게 사프의 히팅베드는 뒤쪽에 가운데에도 홀이 나있습니다 .ㅎㅎㅎ
그래서 그냥 3축으로 사용가능 ㅋㅋ

다만 알리에서산 볼과 세트로 온 볼트가 M5라서 홀을 더 키워줘야 됩니다 ㅠ
드릴로 살짝 홀 키워주면 금방되네요.. 알미늄이라 쌉가능 ㅋ
베드를 얹어 보니 딱 모냥새가 나옵니다. ㅋㅋㅋ
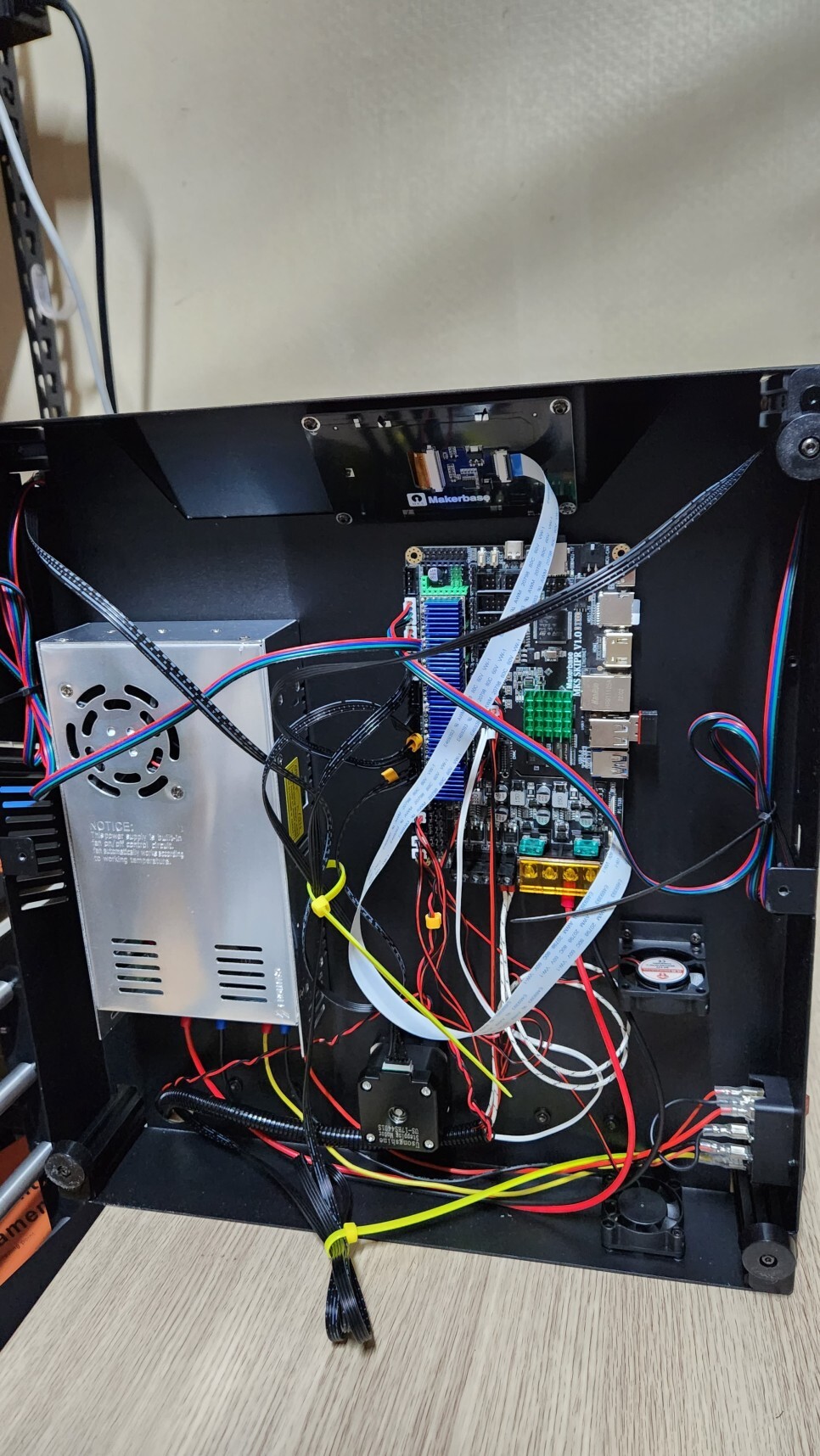
수평이야 이제 클리퍼가 맞춰줄테니 보드를 준비해줍니다 ㅋ
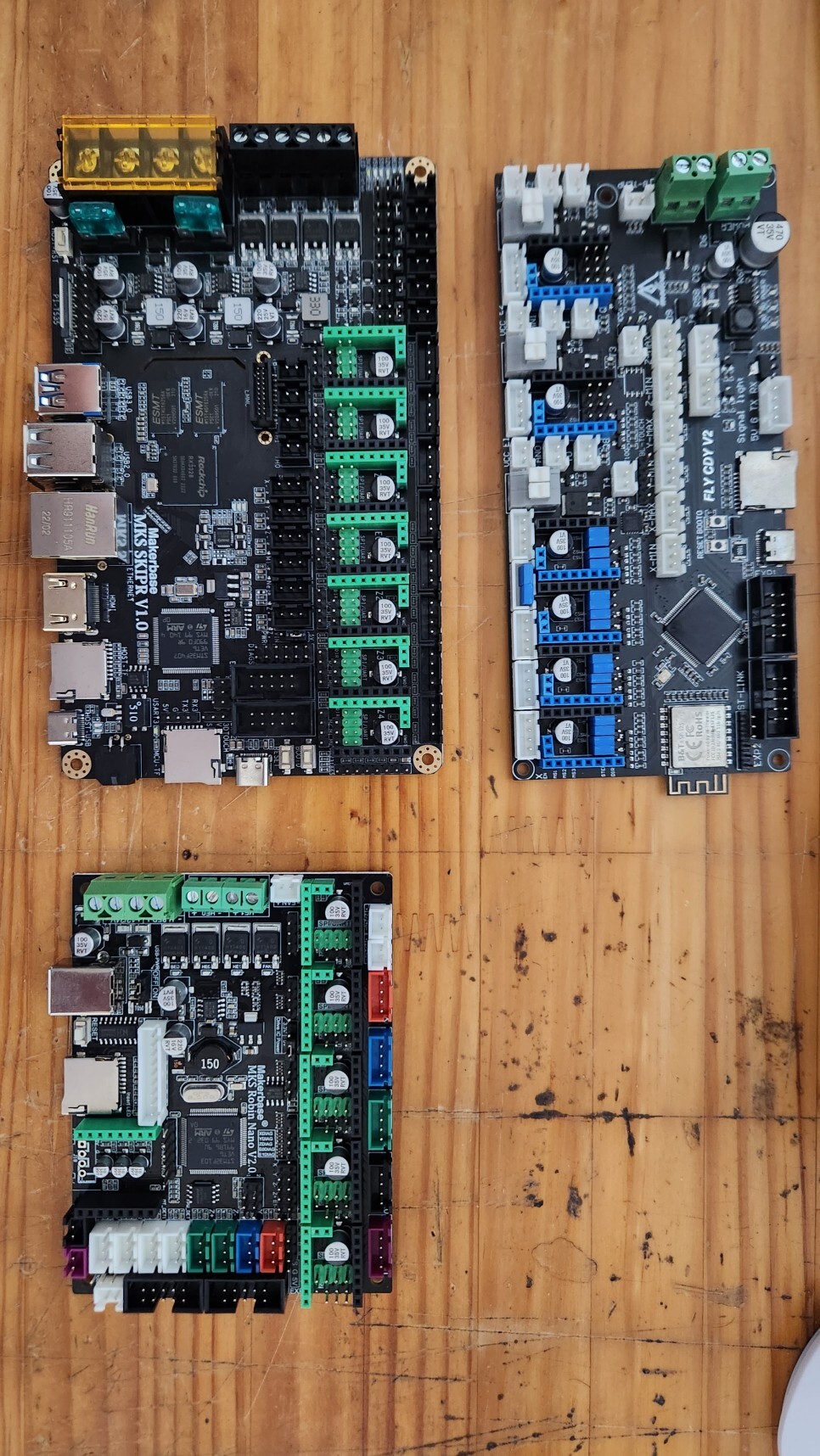
보드가 클리퍼 통합 보드다 보니 정말 앵간히 커서 ㅋㅋ 로빈나노보다 훨크고.. 플라이보드보다도 큽니다 ㅋ

락칩프로세서를 쓰고 무려 3328...
예전에 쓰던 중국산 태블릿이 같은 거 썻던거같은데.. 이거 그럼 윈도우도 포팅되려나 ㅋㅋ

우측에는 포트가 많은데 와이파이 모듈이 없기때문에 따로 다이소에서 사다가 USB랜을 박아줍니다.

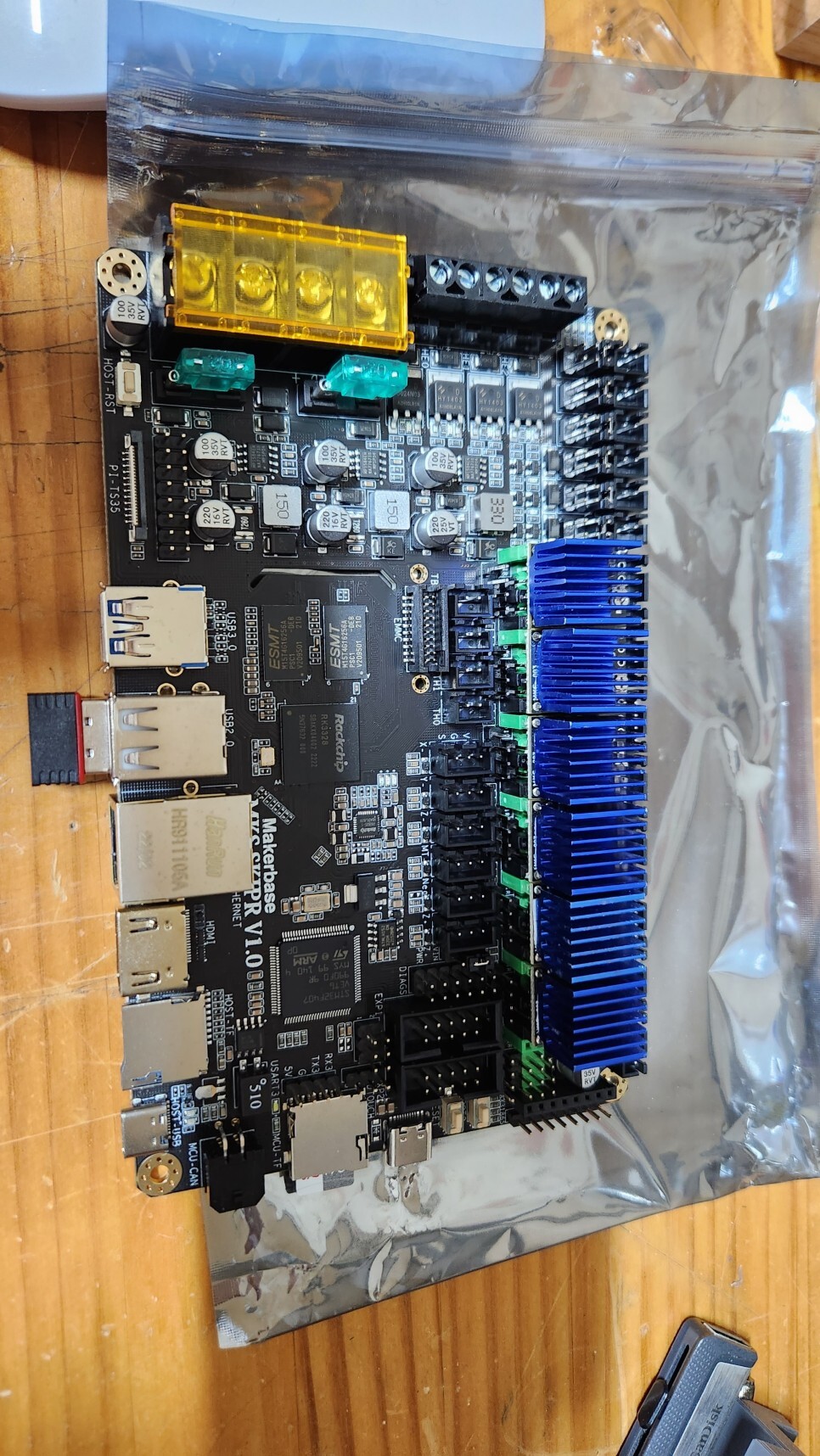
모터드라이버도 다꼽아줍니다. ㅎㅎㅎ
TMC2225가 모자라서.. XYE는 2225 를 박고 나머지 z0, z1, z2는 집에 굴러댕기는 TMC2209 를 썻습니다 .
그리고 SD카드에 클리퍼 펌을 플래싱 해서 꼽고 켜주면 되는데
MKS 깃헙에 보면 굉장히 자세히 쉽게 잘 설명 되있습니다.
무려 펌도 다짜서 올려놈.. 유저 편의성에 대해서 상당히 진심인 친구들이네요. ㅎㅎ
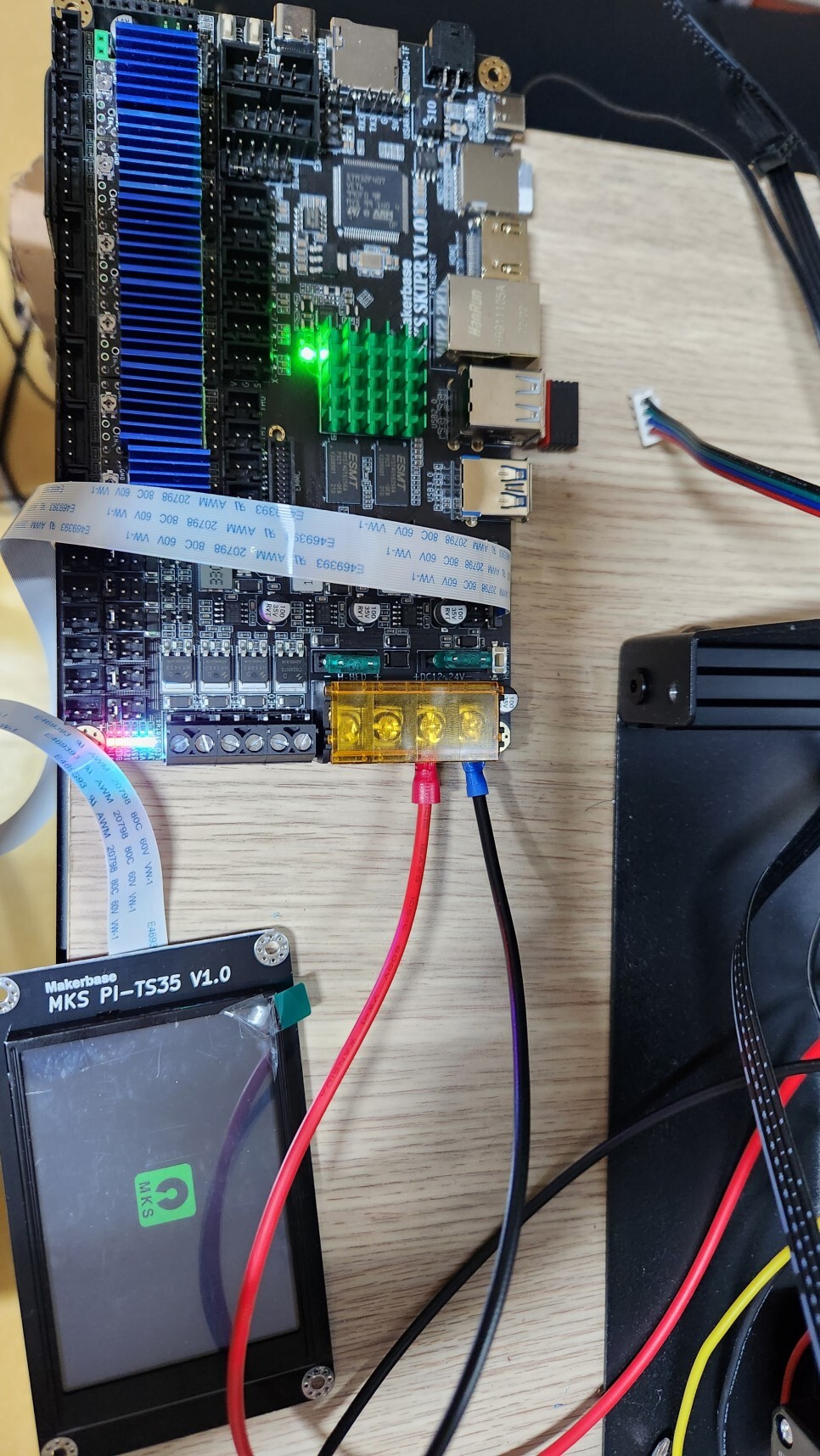
우선 배선을 하고 전원 켜봅니다.
클리퍼가 딱 설치되서 나오는군요 ㅋㅋㅋㅋ
잘보면 보드 위쪽에는 프린터 보드가 사용하는 SD카드이고
오른쪽에 있는 sd카드 슬롯은 클리퍼를 돌리는 Pi 프로세서의 슬롯이라고 생각하시면 됩니다 ㅋ
즉, 당연한 이야기지만 sd카드를 두개 사용 ㅋ
펌을 올리고 실장해봤는데, LCD가 사플, 사프 순정과 같은 3.5TFT라 딱맞습니다. ㅋㅋ
다만, 다하고 뚜껑 닫고 보니 까 화면이 돌아가 있네요;;;
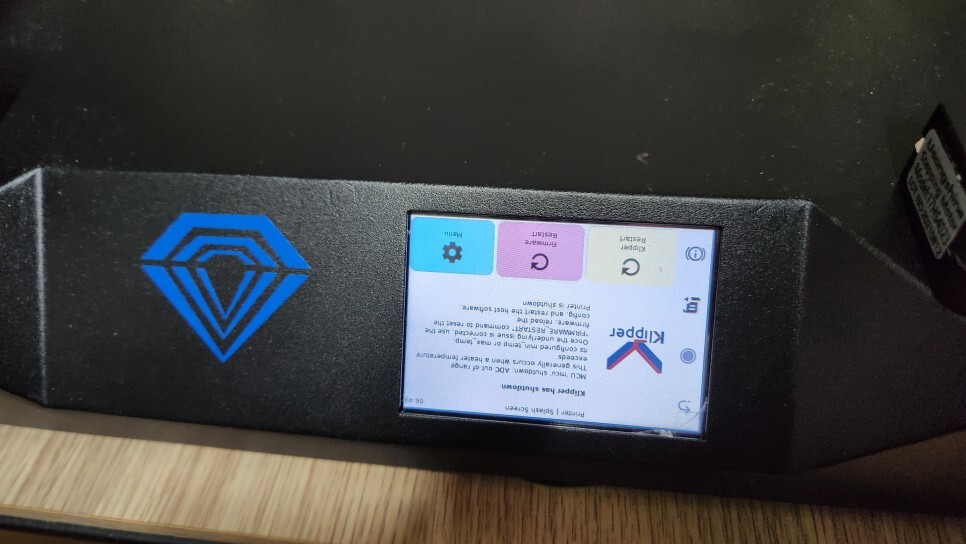
화면 돌리는 방법도 MKS 깃헙에 친절하게 설명되있었습니다.
이런 일을 겪는 유저가 겁나게 많은가봄 ㅋㅋㅋ
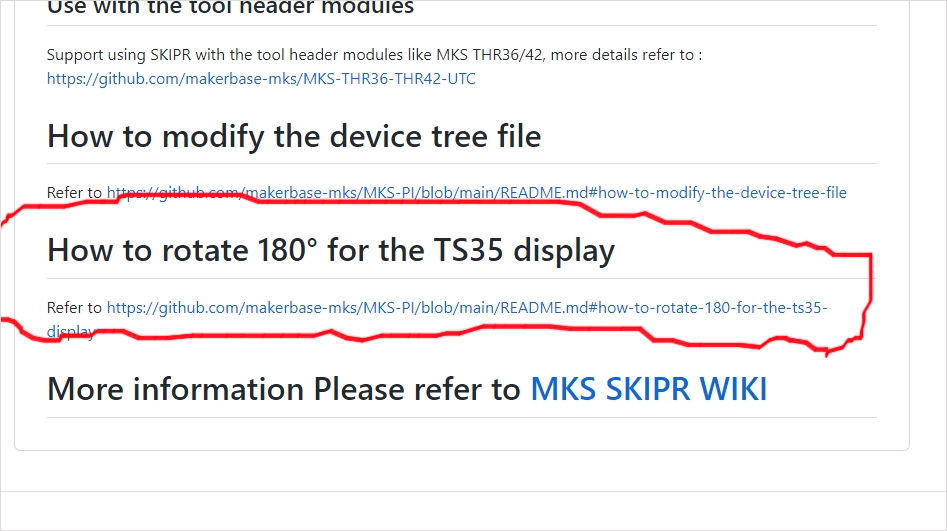
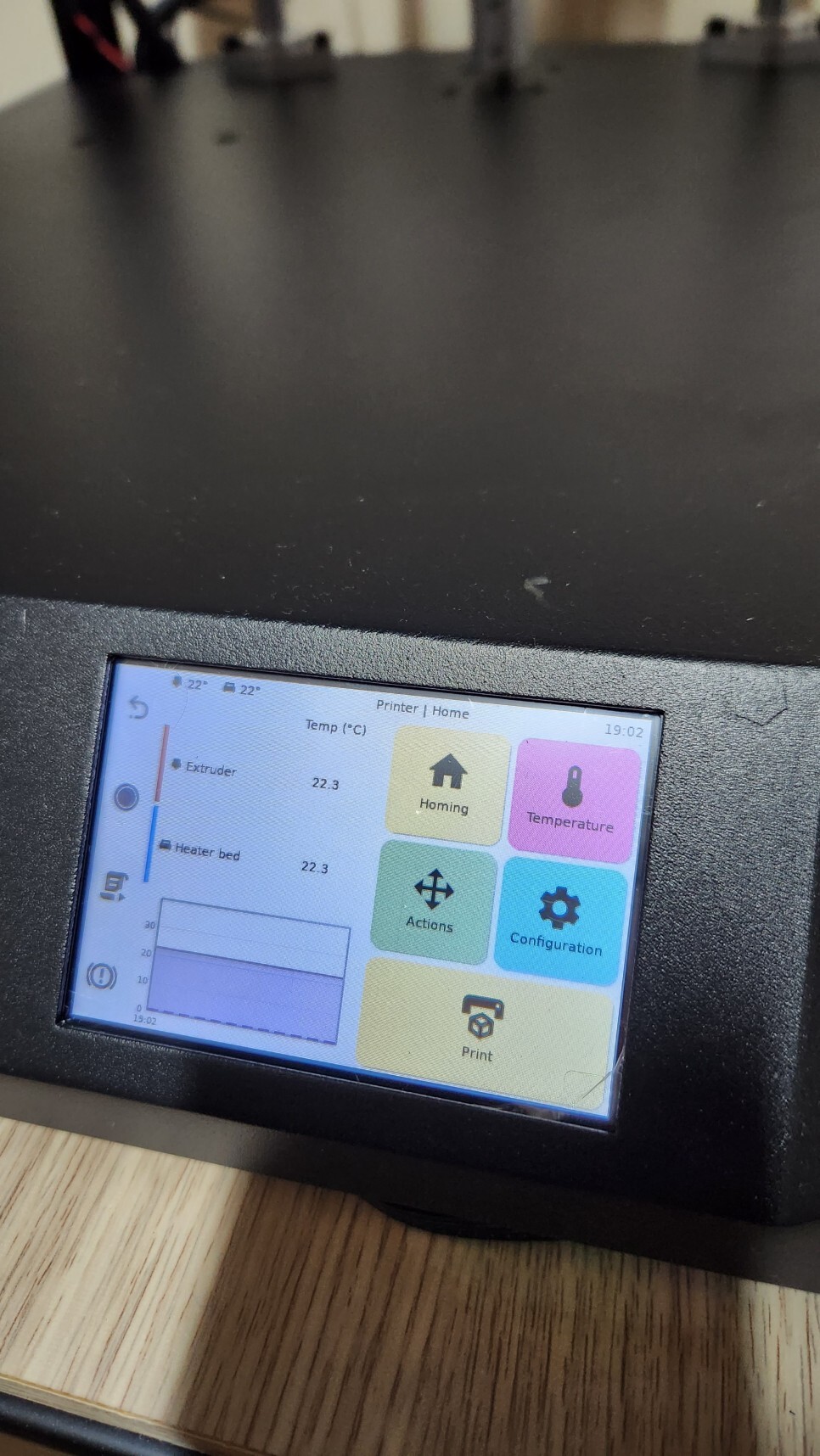
여튼 그대로 따라서 해보니
잘나옵니다 ㅋㅋ
이제 대략적인 하드웨어 세팅은 마쳤고,
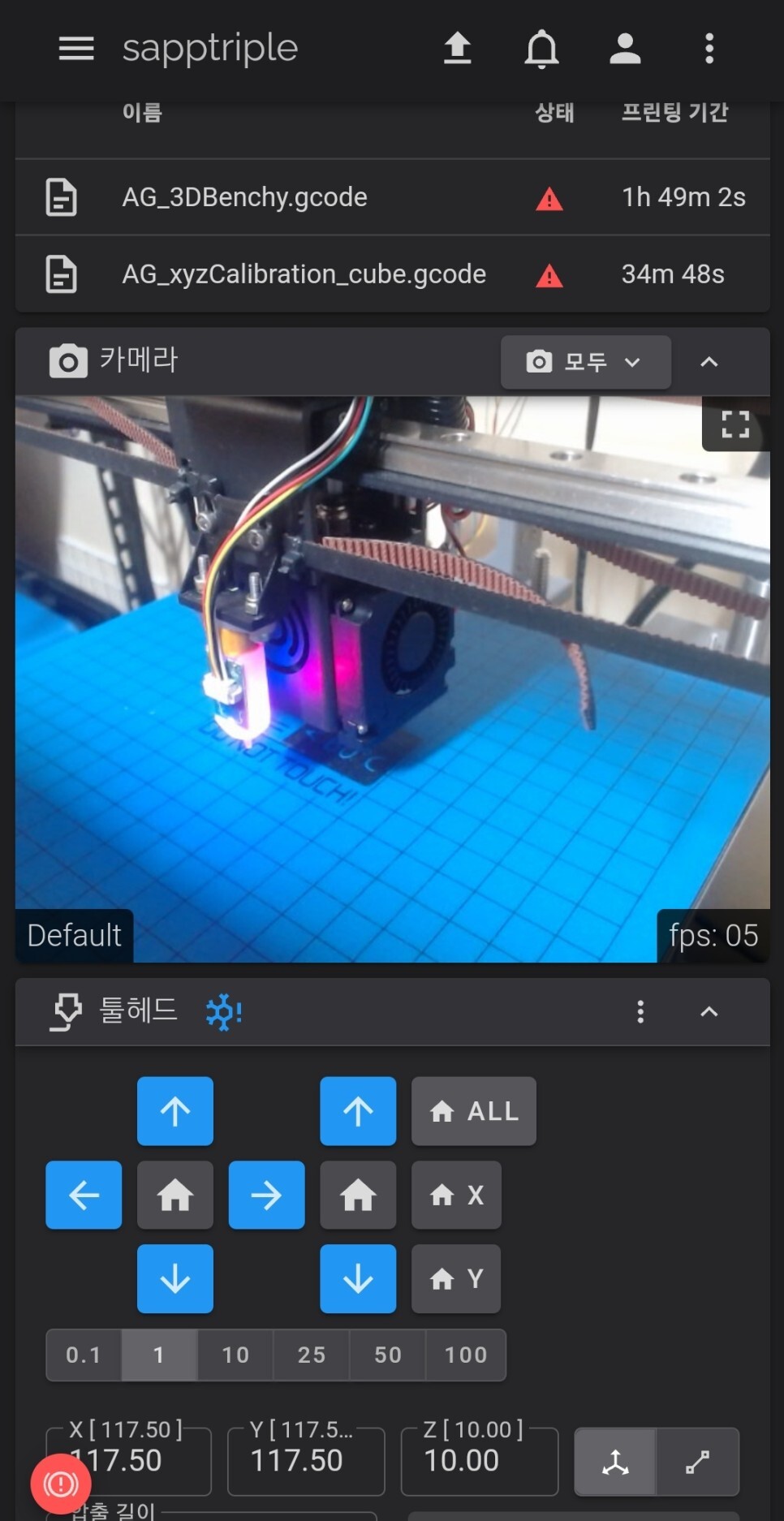
Config를 올려주면 됩니다. 카메라는 그냥 USB에 연결했는데
잘나오네요 ㅋㅋ
폰으로 봐도 잘보이고 좋습니다. 인터넷 속도도 상당히 잘나옴 ㅋ
컨피그는 다른거 건들거 없고,
기본 사양 베드 사이즈 같은거 잘 넣어주시고
Z축만 모터가 세개가 됐기에 아래 같이 설정해줬습니다.
대충 보드 핀맵 켜놓고 잘 넣어주면 됩니다.
|
[stepper_z]
step_pin:PE1
dir_pin:PE0
enable_pin:!PE2
microsteps:16
rotation_distance: 2
full_steps_per_rotation: 200
endstop_pin:probe:z_virtual_endstop## PB12 for Z-max; endstop have'!' is NO
position_max: 255
position_min: -5
homing_speed: 8
second_homing_speed: 3
[stepper_z1]
step_pin:PD6
dir_pin:PD5
enable_pin:!PD7
microsteps:16
rotation_distance: 2
full_steps_per_rotation: 200
[stepper_z2]
step_pin:PD2
dir_pin:PD1
enable_pin:!PD3
microsteps: 16
rotation_distance: 2
full_steps_per_rotation: 200
[tmc2209 stepper_z]
uart_pin: PB7
run_current: 0.8
hold_current: 0.5
interpolate: True
stealthchop_threshold: 120
[tmc2209 stepper_z1]
uart_pin: PD4
run_current: 0.8
hold_current: 0.5
interpolate: True
stealthchop_threshold: 120
[tmc2209 stepper_z2]
uart_pin: PD0
run_current: 0.8
hold_current: 0.5
interpolate: True
stealthchop_threshold: 120
|
그리고 BL터치 항목 추가 ㅋ
|
[bltouch]
sensor_pin: ^PB15
control_pin: PA8
x_offset: 0
y_offset: -44
#z_offset: 0
speed: 10.0
samples: 2
samples_result: median
sample_retract_dist: 10
samples_tolerance: 0.05
samples_tolerance_retries: 1
[bed_mesh]
speed: 150
horizontal_move_z: 5
mesh_min: 50,50
mesh_max: 175,175
probe_count: 3,3
mesh_pps: 2,2
algorithm: bicubic
move_check_distance: 3
|
그리고 제일 중요한 3축을 만든 이유인... Z틸트 기능 추가
|
[z_tilt]
# Use Z_TILT_ADJUST to level the bed .
# z_positions: Location of toolhead
#--------------------------------------------------------------------
# Uncomment below for 250mm build
z_positions:
117.5, 222
13, 13
222, 13
points:
117.5, 185
50, 50
185, 50
horizontal_move_z: 10
|
z_positions는 베드 볼이 달려있는 위치를 자로 재서 적었습니다.
포인트는 BL터치가 측정하는 위치고 모터 위치와 매치가 되게 동일하게 했습니다.
Config는 좀더 잘 정리해서 나중에 출력물 모델링 파일과 함께 세트로 한번 공유드리겠습니다.
그리고 메인 화면으로 돌아와서 .. 호밍을 먼저해주고
Z틸트 버튼을 누르면
짠.. 알아서 베드 수평을 맞춰 줍니다.
아예 스타트 코드에 넣어서 호밍>틸트> 오토레벨링 순으로 넣었습니다.
그럼 틸트로 수평을 맞추고 > 오토레벨링으로 세부적인 베드 굴곡을 측정한 후 에 출력을 시작합니다.
아주 똑똑하죠 ㅋㅋ
클리퍼가 참쉽고 설치가 빠르네요
이제 출력을 돌려봅니다.
우선 큐브 부터 ㅋ
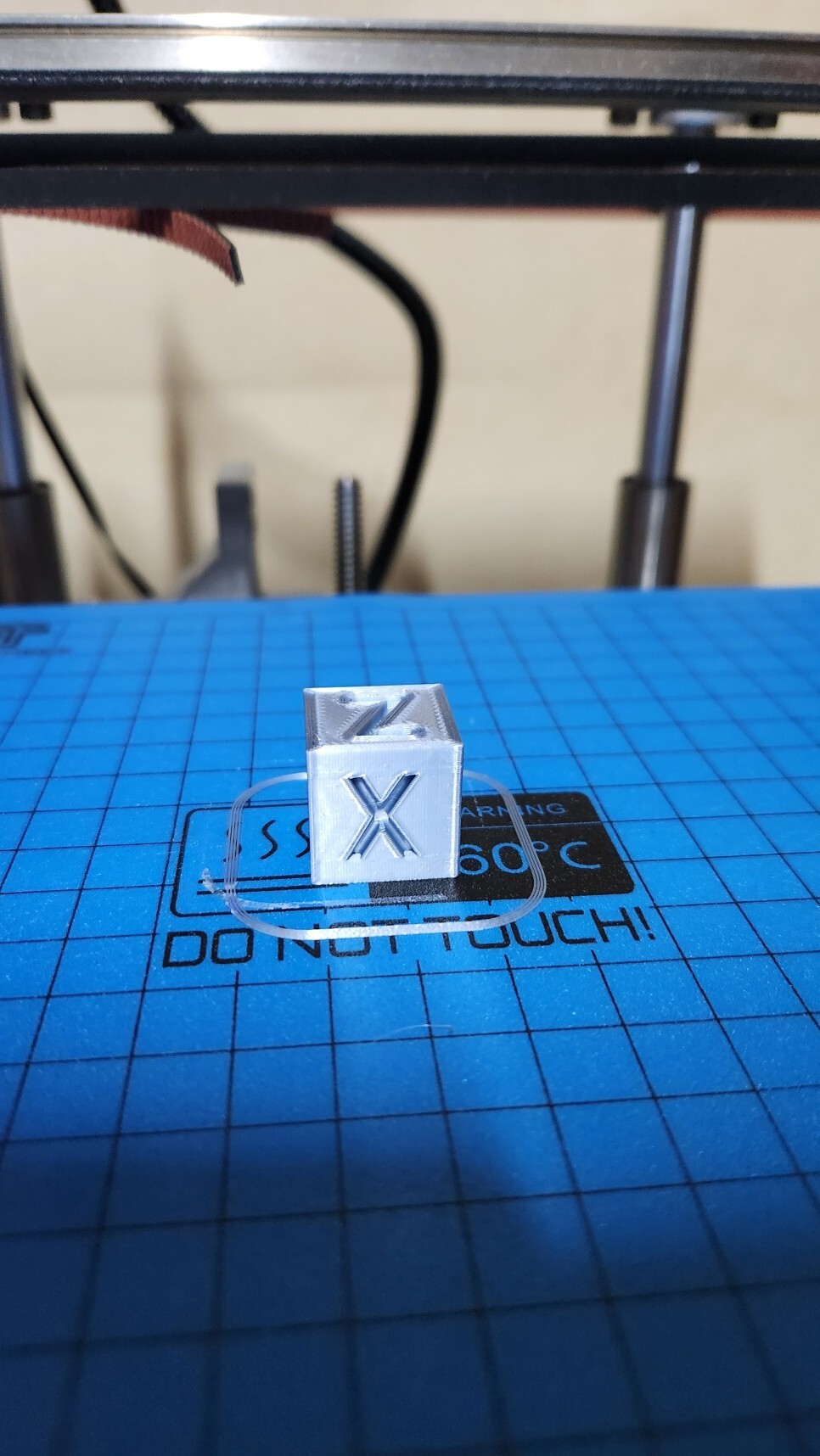
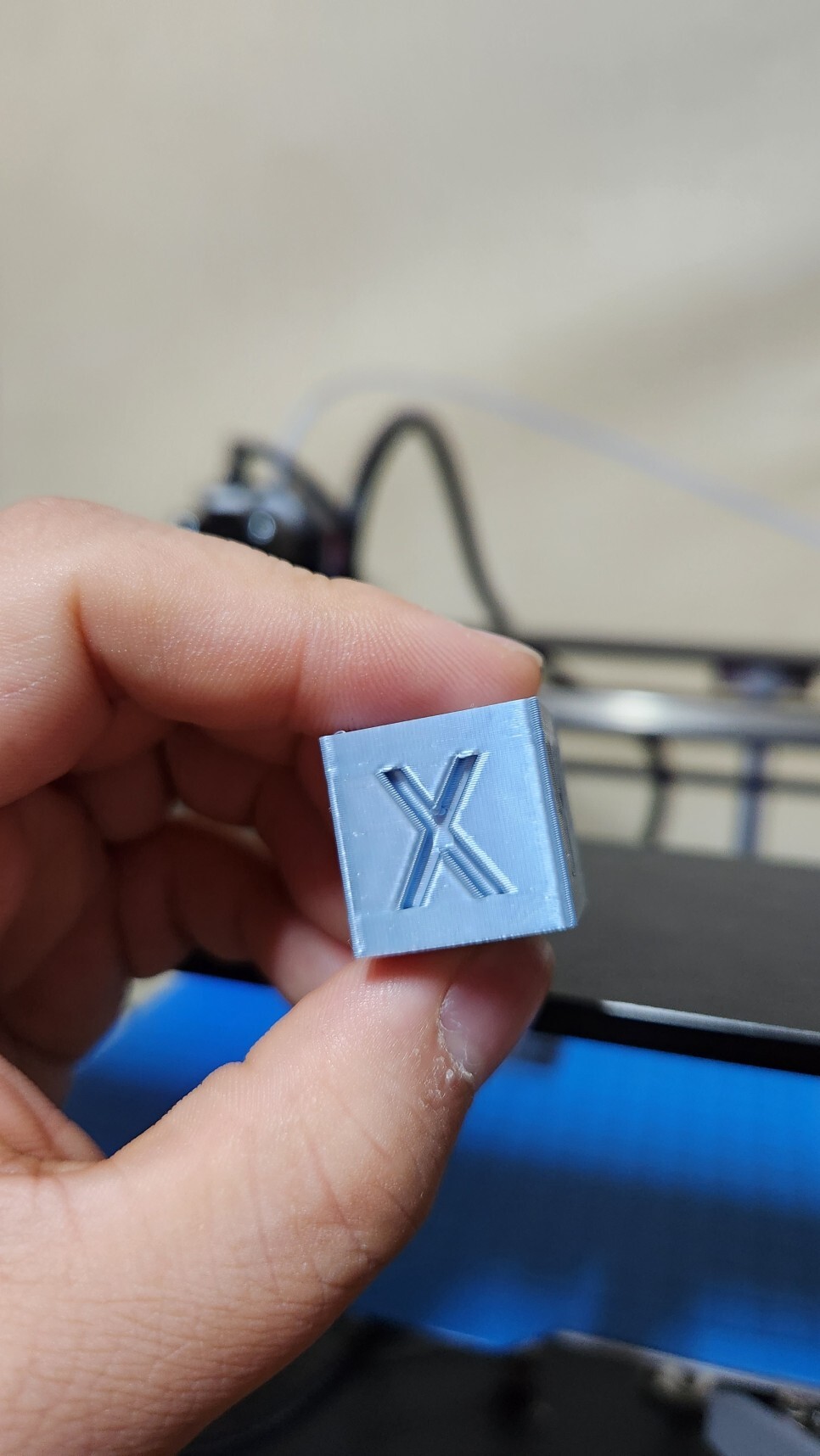
첫출력 부터 바로바로 잘나옴 ㅋㅋ
사실 안나올이유가 없긴한데;;ㅎㅎ
보트도 깔끔하게 잘나왔습니다. ㅎㅎ
이정도로 마치도록하겠습니다 ㅎㅎ
3축 프린터를 처음 써봐서 일단 좀더 굴려봐야겠네요.
Z틸트 기능도 마를린펌에서부터 보긴했었는데 사실 엔더같은 멘델타입에서 좌우 z모터 따로 써서
z틸트 기능을 쓰는건 X축만 틀어지고 좋지는 않을거같아서 지양했었는데 ...사실 이부분은 조립할때부터 수평을 잘맞춰야 된다고 봐서 ㅎㅎ
베드가 움직이는 코어 XY에서는 참좋은 기능인거 같습니다.
무엇보다 추억의 사프를 가지고 재밌게 만들어 볼 수 있어서 좋았음.
총비용은 이정도 들었는데..
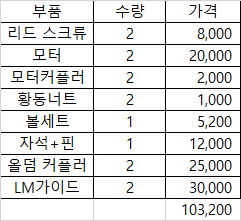
여기에 보드까지 하면 8만원정도 추가..
아니면 집에 남는 보드 있으면 라즈베리 달아서 보드 두개로 구성해도 됩니다.
사프 요새 할인해서 엄청싸던데 ..
기본 사프 40만원에 10만원 정도 추가해서 유사 트던을 만들수있는 마법 ㅋㅋㅋㅋ
여튼 재미난 장난감 하나 더 생겼네요 ㅎㅎ